


Základní teorie provozu bezkomutátorových servomotorů se točí kolem principů magnetismu, kde se podobné póly odpuzují a opačné póly se přitahují. V servomotoru se nacházejí dva magnetické zdroje: permanentní magnety, které jsou obvykle umístěny na rotoru motoru, a stacionární elektromagnet, který rotor obklopuje. Elektromagnet se nazývá buď vinutí statoru nebo motoru a je vyroben z ocelových plátů nazývaných lamely, které jsou spojeny dohromady. Ocelové desky mají obvykle „zuby“, které umožňují navinutí měděného drátu kolem nich.
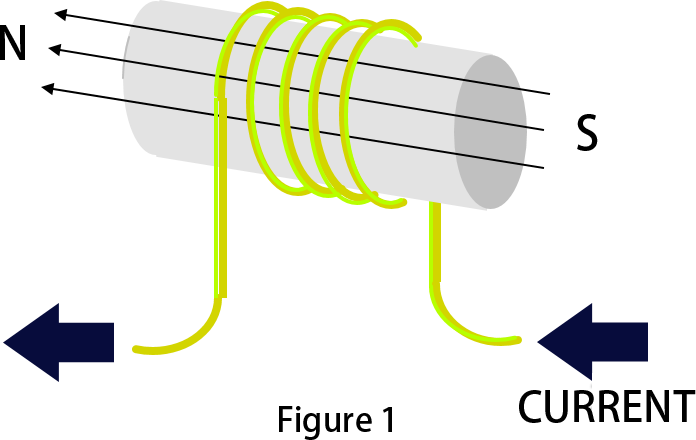
Vrátíme-li se k principům magnetismu, když je vodič jako měděný drát zformován do cívky a vodič je napájen tak, že jím protéká proud, vzniká magnetické pole.
Toto magnetické pole vytvořené proudem procházejícím vodičem bude mít severní pól a jižní pól. S magnetickými póly umístěnými na statoru (když je pod napětím) a na permanentních magnetech rotoru, jak vytvoříte stav opačných pólů, které se přitahují a jako póly odpuzují?
Klíčem je obrátit proud procházející elektromagnetem. Když proud protéká vodivou cívkou v jednom směru, vytvoří se severní a jižní pól.

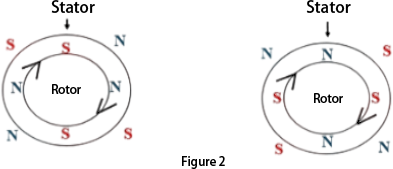
Když se změní směr proudu, póly se překlopí, takže to, co bylo severním pólem, je nyní jižním pólem a naopak. Obrázek 1 poskytuje základní ilustraci toho, jak to funguje. Na obrázku 2 obrázek vlevo ukazuje stav, kdy jsou póly magnetů rotoru přitahovány k opačným pólům statoru. Póly rotoru, které jsou připevněny k hřídeli motoru, se budou otáčet, dokud nebudou vyrovnány s protilehlými póly statoru. Pokud by vše zůstalo stejné, rotor by pak zůstal nehybný.
Obrázek vpravo na obrázku 2 ukazuje, jak se póly statoru překlopily. To by se stalo pokaždé, když pól rotoru dostihl opačný pól statoru obrácením toku proudu přes toto konkrétní místo statoru. Neustálé překlápění pólů statoru vytváří stav, kdy póly permanentního magnetu rotoru stále „honí“ své protiklady statoru, což má za následek nepřetržité otáčení hřídele rotoru/motoru.
Překlápění pólů statoru je známé jako komutace. Formální definice komutace je „Působení řídicích proudů na správné fáze motoru tak, aby se dosáhlo optimálního točivého momentu motoru a otáčení hřídele motoru“. Jak jsou proudy řízeny ve správný čas, aby se udržela rotace hřídele?
Řízení je prováděno měničem nebo pohonem, který pohání motor. Když je měnič používán s konkrétním motorem, je v softwaru měniče identifikován úhel offsetu spolu s dalšími věcmi, jako je indukčnost motoru, odpor a další parametry. Zpětnovazební zařízení, které se používá na motoru (kodér, resolver, atd..), poskytuje pohonu polohu hřídele rotoru/magnetického pólu.
Když se poloha magnetického pólu rotoru shoduje s úhlem posunu, měnič obrátí proud procházející cívkou statoru, čímž změní pól statoru ze severu na jih a z jihu na sever, jak je znázorněno na obrázku 2. Z toho můžete vidět, že Pokud necháte póly vyrovnat, zastaví se rotace hřídele motoru nebo změna sekvence způsobí, že se hřídel bude otáčet jedním směrem proti druhému, a jejich rychlá změna umožňuje rotaci vysokou rychlostí nebo právě naopak pomalou rotaci hřídele.






